micro:bit戦車を別のmicro:bitで無線通信で操作する
この記事は micro:bit Advent Calendar 2018 の 3日目の記事です。
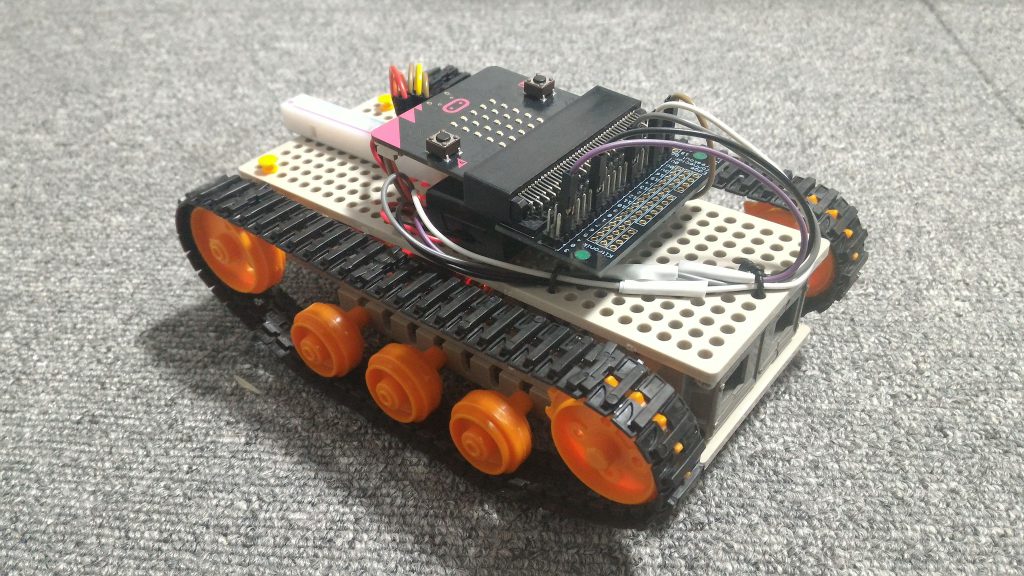
micro:bit戦車の車体の作り方については「micro:bit で動くプログラミング戦車を作る」を参照ください。
micro:bit に限らずスマートカーの真髄は自動運転プログラムにあるとは思いますが...
でも...
やっぱり...
自分で操作したい!
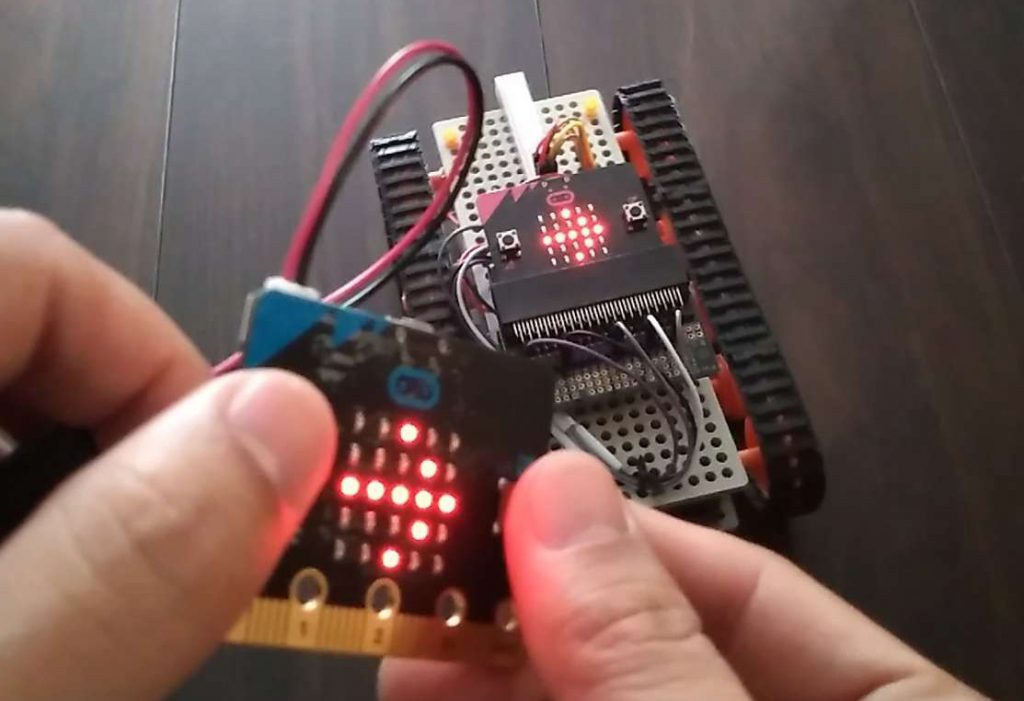
と、言うことで、今回はもう一台別の micro:bit をコントローラーとして使う方法を試してみました。
まずは動きを見てみてください。

こんな感じです。それではどうなっているか見てみましょう。
送信側プログラム
まず送信側のmicro:bitのプログラムがこちら

見ての通りではあるが、micro:bit にはAとBの2つのボタンしかないので、操作方法としては以下のように割り振っています。
- 前進 - Bボタンを押す
- 後退 - Aボタンを押す
- 停止 - micro:bitをゆさぶる
- 右旋回 - 右に傾けてAとBを押す
- 左旋回 - 左に傾けてAとBを押す
ボタンが押されたりした時に無線で数字を送信しています。
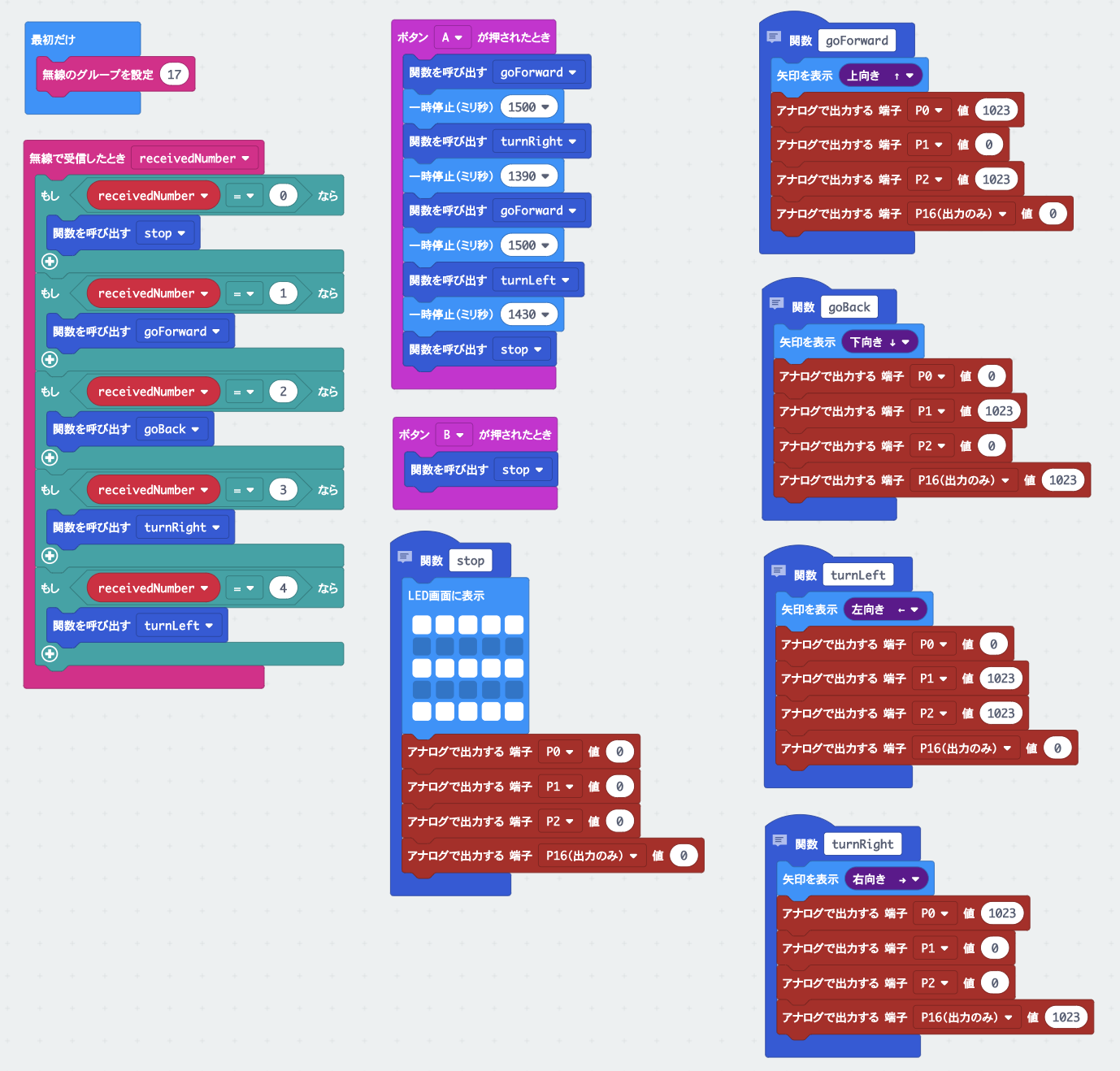
受信側プログラム
受信側は下記にようにしています。

単純に無線で番号を受け取って、番号に応じてgoForward(前進)やgoBack(後退)の関数を実行しています。
戦車側の全部のプログラムはこちら
いやー、ホント簡単ですね!
今後の課題
とりあえず今後は
- micro:bit ではなくスマホから操作する
- モーターの電源が非力なので3Vから4.5Vに増強する
をしつつ、
- 音を出す
- 距離センサーで障害物回避機能を試す
などやってみたいなと思ってます。
投稿者プロフィール
-
名古屋のウェブ制作会社数社に10年程度務めた後、株式会社ベクトル設立。
企画・運営・コンサルティング〜WordPressを中心としたシステム開発まで幅広く携わる。
[ 著書 ]
・いちばんやさしいWordPressの教本(共著)
・現場でかならず使われているWordPressデザインのメソッド(共著)
[ 最近のWordPressコミュニティでの活動 ]
2018 WordCampOsaka セッションスピーカー
2017 WordCampKyoto セッションスピーカー
2016 WordCampTokyo LT
2016 WordCampKansai ハンズオン世話役
2015 WordCampTokyo セッションスピーカー
2015 WordCampKansai セッションスピーカー
2014 WordFesNagoya 実行委員 & セッションスピーカー
2013 WordCampTokyo セッションスピーカー(パネラー)
2013 WordFesNagoya 実行委員 & セッションスピーカー
2013 WordCrabFukui セッションスピーカー
他